Resumen
En este trabajo se exploró la implementación de un clasificador automático de 10 gestos manuales relevantes a partir de señales de electromiografía de superficie del antebrazo. En particular, se hizo uso de redes neuronales recurrentes (RNN), con base en los resultados diferentes experimentos en los que se usaron otras arquitecturas, y la compatibilidad de las RNN con la naturaleza del problema. Una parte importante del trabajo constó del estudio de la transferencia de aprendizaje, mediante experimentos in silico, de sujetos intactos a sujetos con amputación, y entre diferentes sujetos con amputación, empleando los conjuntos DB2 (sujetos intactos) y DB3 (sujetos con amputación transradial de mano) de NinaPro, una base de datos de acceso abierto. Los resultados apuntaron a que resulta difícil aprender patrones entre diferentes sujetos, ya sean intactos o con amputación. Se hizo especial foco en el desarrollo de modelos útiles sobre datos provenientes de sujetos amputados. Las mejores soluciones alcanzadas para estos casos, se consiguieron creando sistemas de clasificación personalizados para cada sujeto, aunque presentaron una variabilidad importante en el desempeño (accuracies entre 11% y 86%). Los gestos fueron seleccionados mediante consultas con un terapista ocupacional, tomando en cuenta el impacto en las actividades de la vida diaria de un sujeto con amputación de mano. Como trabajo a futuro se planteó estudiar los tiempos de inferencia de los modelos propuestos, y la viabilidad de su implementación en sistemas embebidos.
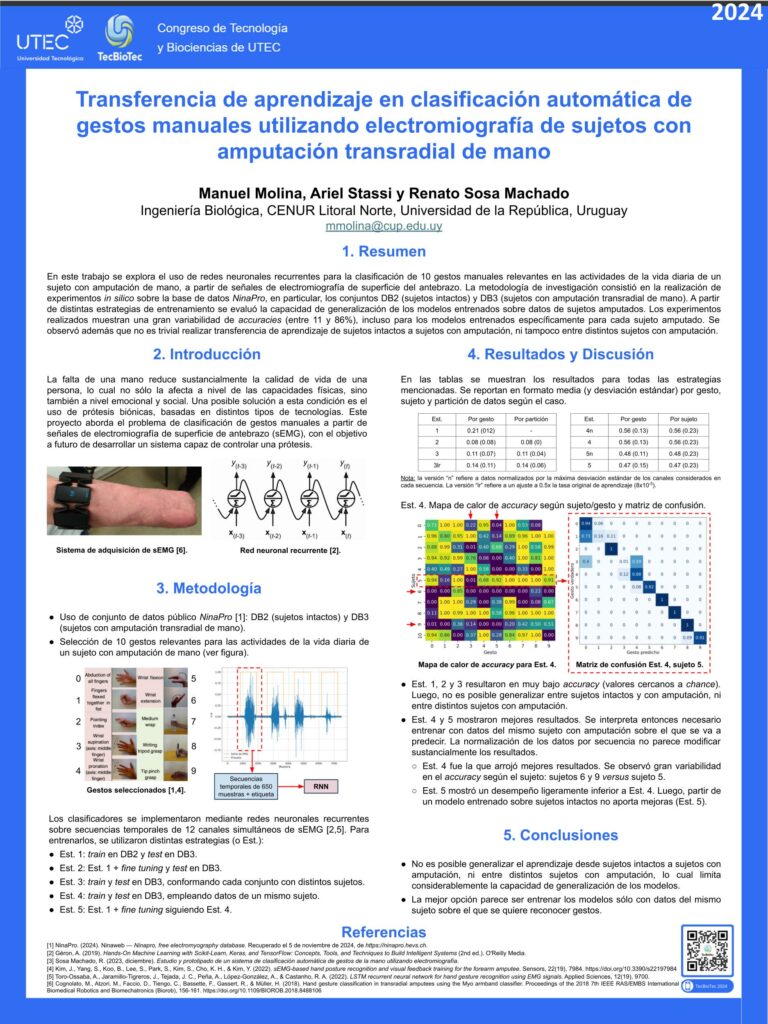
En este trabajo se exploró la implementación un clasificador automático de 10 gestos manuales a partir de señales de electromiografía de superficie del antebrazo. Para ello, se emplearon redes neuronales recurrentes (RNN), seleccionadas debido a su compatibilidad con la naturaleza del problema y a los resultados obtenidos en pruebas comparativas con otras arquitecturas.
Un aspecto clave del estudio fue la exploración de la transferencia de aprendizaje mediante experimentos in silico, evaluando la generalización del modelo desde sujetos intactos hacia sujetos con amputación y entre distintos sujetos con amputación. Se utilizaron los conjuntos de datos DB2 (sujetos intactos) y DB3 (sujetos con amputación transradial de mano) de NinaPro, una base de datos de acceso abierto. Los resultados mostraron que la identificación de patrones entre diferentes sujetos, tanto intactos como amputados, resultaba difícil, obteniendo valores de accuracy muy bajos.
Se puso un énfasis particular en el desarrollo de modelos eficaces para sujetos con amputación. Las mejores soluciones se obtuvieron mediante sistemas de clasificación personalizados para cada individuo, aunque con una variabilidad significativa en el desempeño (accuracies entre 11% y 86%). La selección de los gestos se realizó en consulta con un terapista ocupacional, priorizando su relevancia para las actividades de la vida diaria de personas con amputación de mano.
Como trabajo futuro, se propone estudiar los tiempos de inferencia de los modelos desarrollados y evaluar su viabilidad para su implementación en sistemas embebidos.
Congresos
TecBioTec congreso de tecnologías y biociencias UTEC, Paysandú. Desarrollado los días 7 y 8 de noviembre.